Stewart Platform
📍 Penn State - ME 445 Microcomputer Interfacing
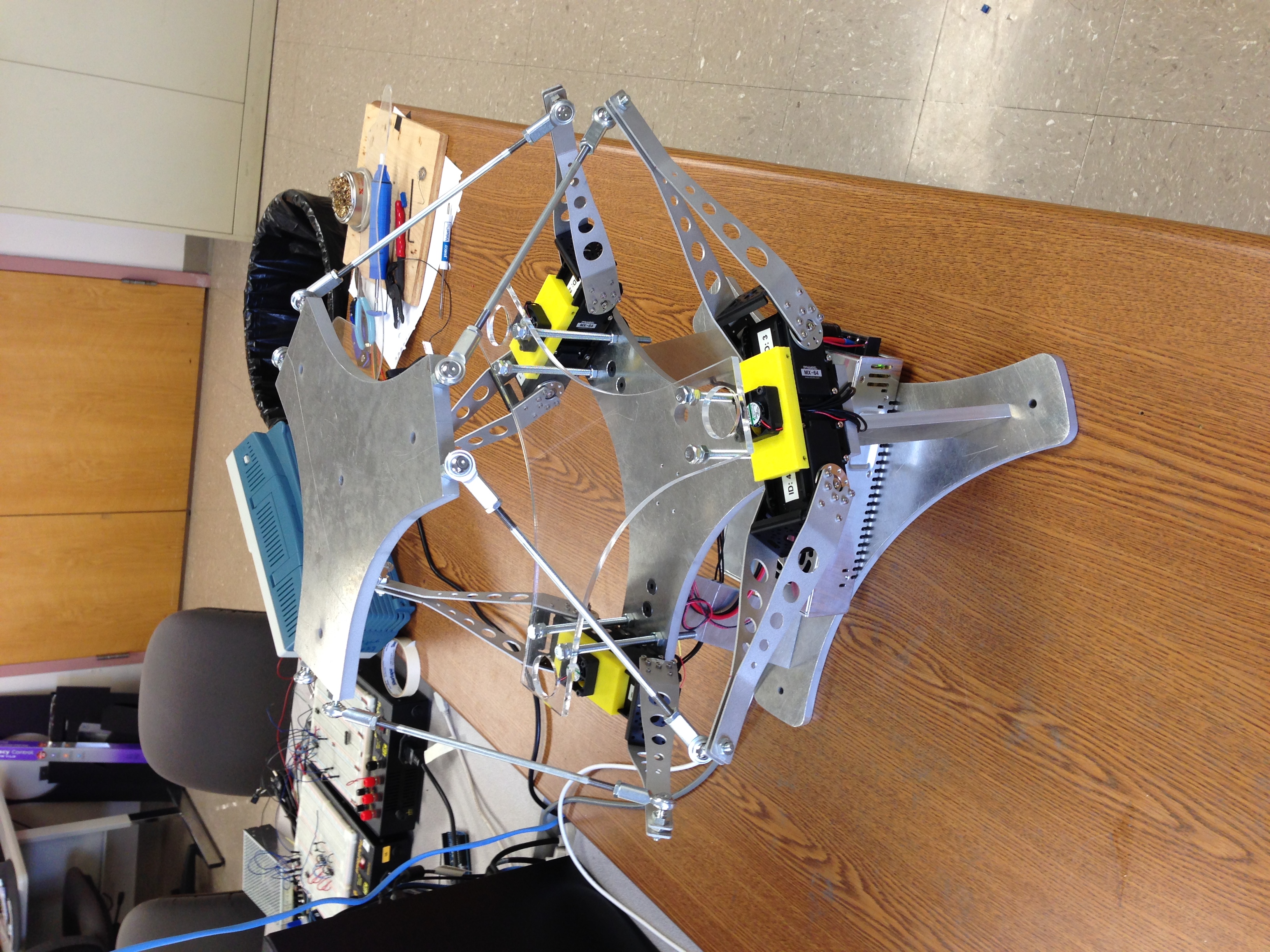
I built a Stewart platform as a final project in my senior elective class, ME 445 Microcomputer Interfacing for Mechanical Engineers.
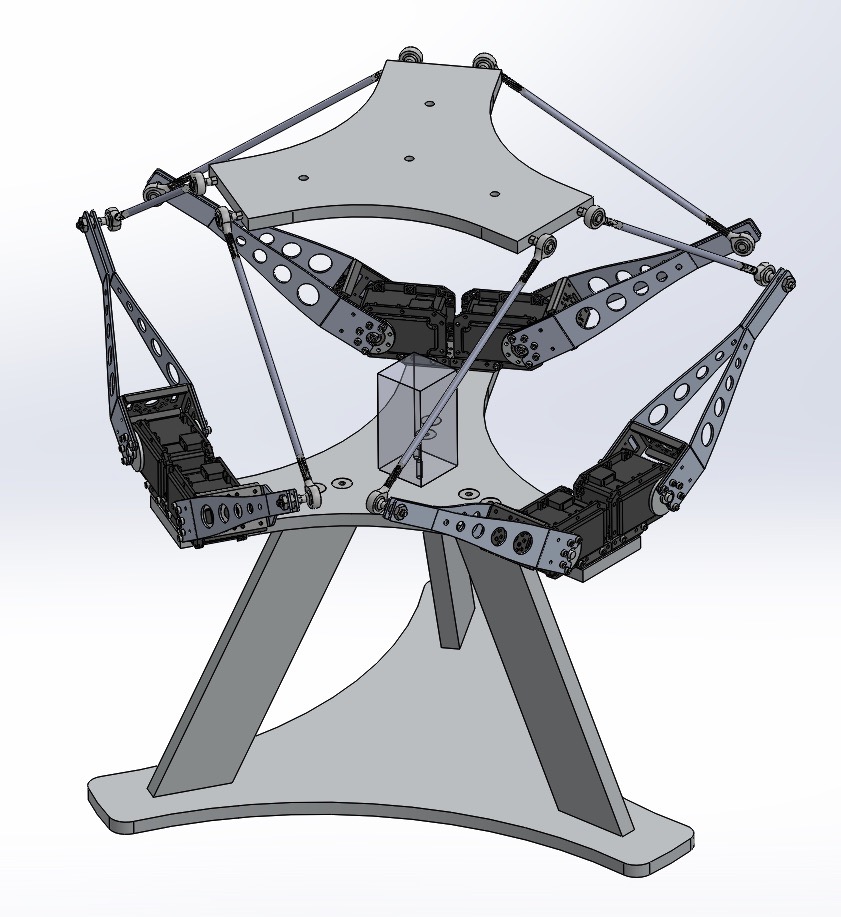
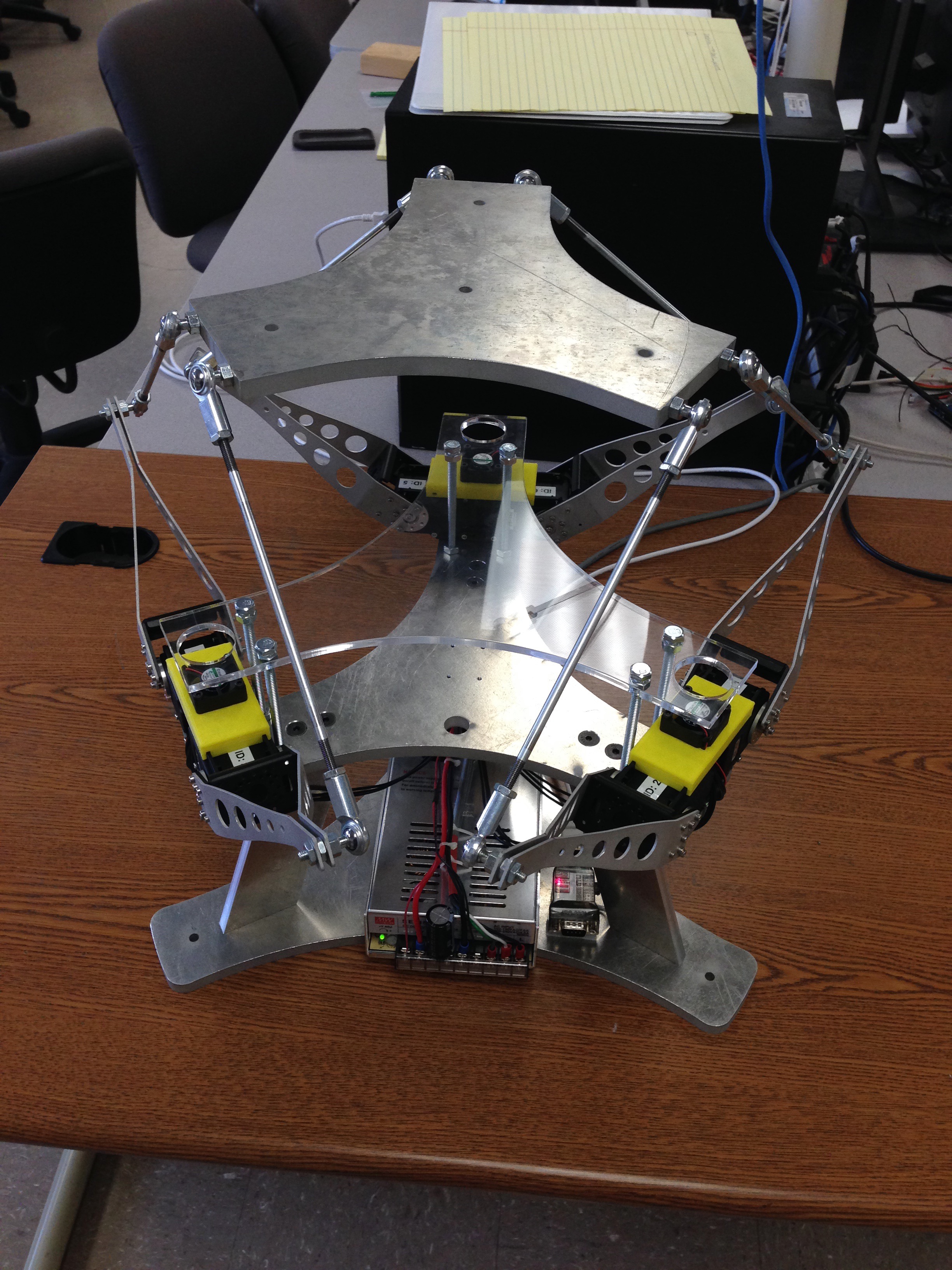
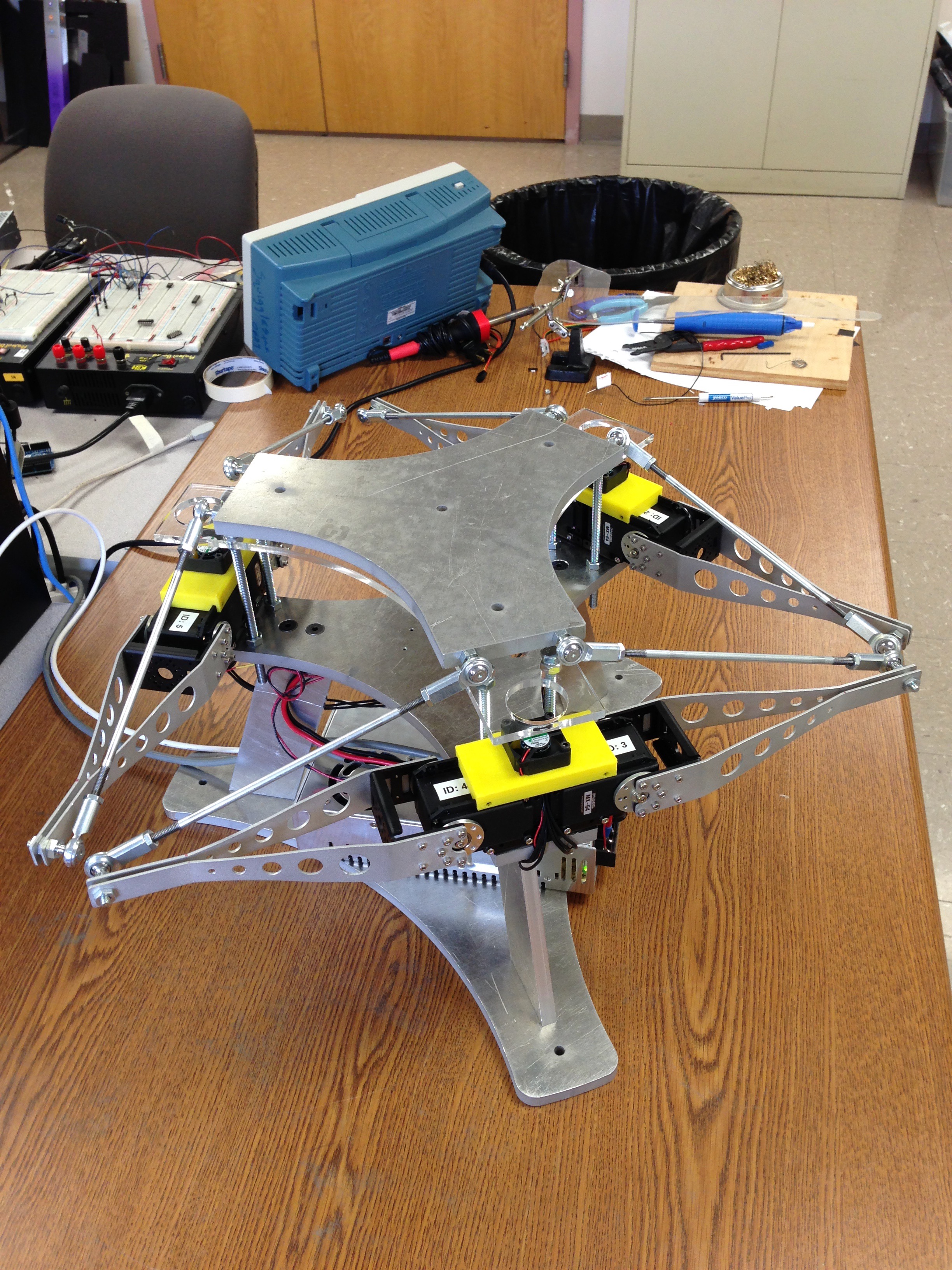
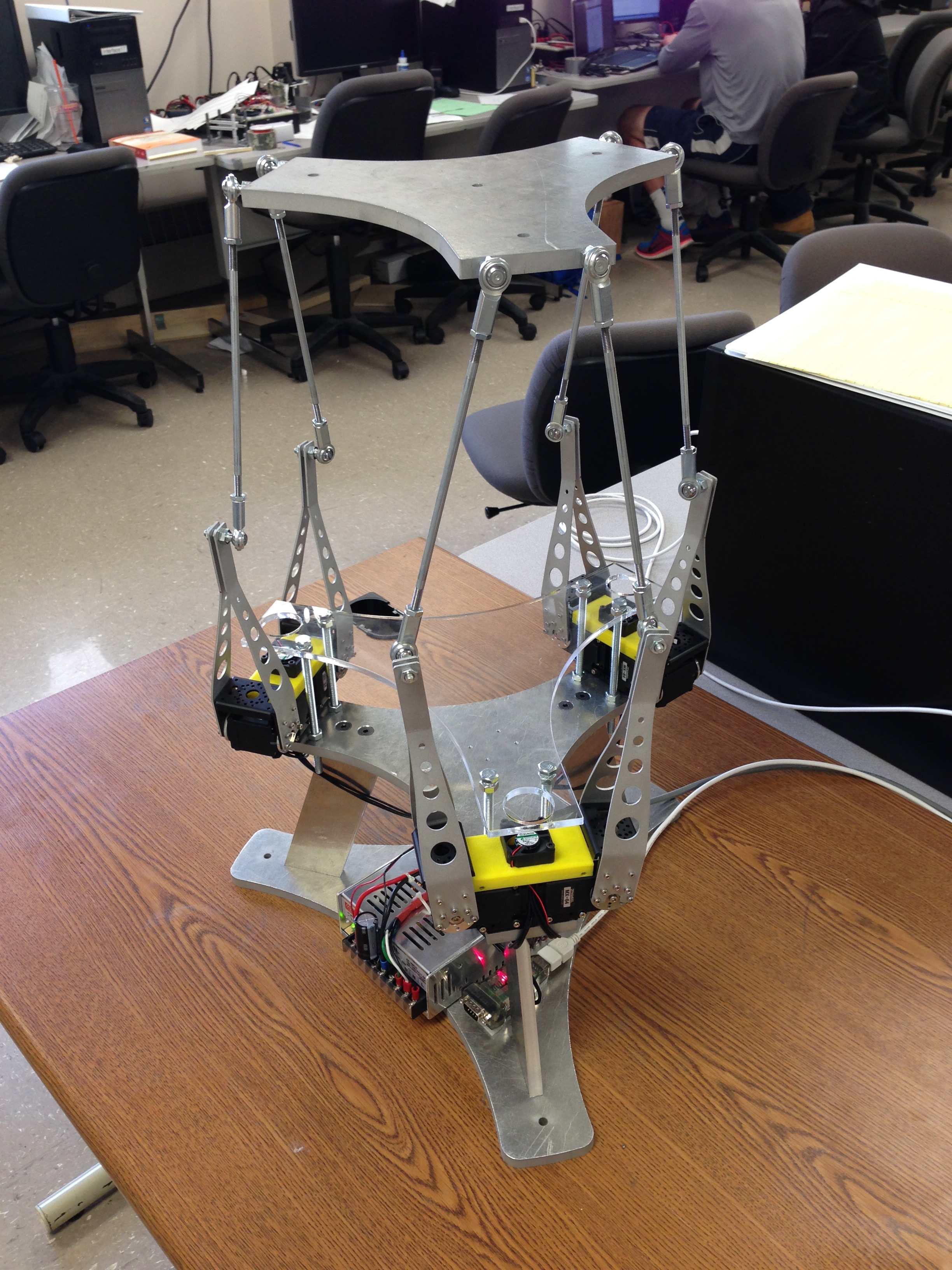
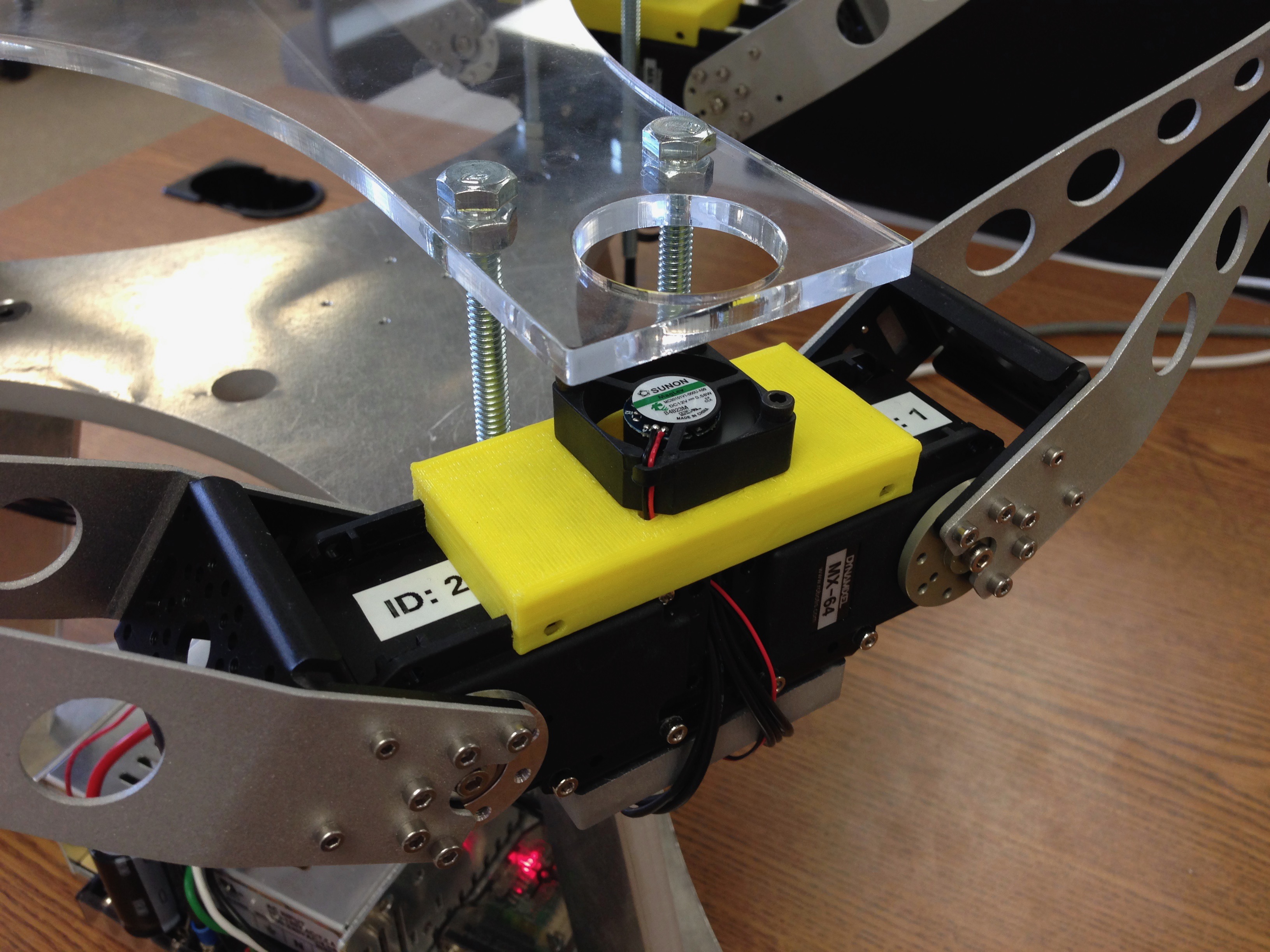
A Stewart Platform is a six degree of freedom manipulator commonly used in motion simulators and positioning applications. Six independent computer-controlled actuators work together to precisely control the position of a platform. The platform and demonstration software was designed to simulate wave-like motion that a helipad-equipped vessel might experience while at sea. The simulated motion was used as part of a research project to train quadcopter landing algorithms for maritime use.